
凝胶材料具有先天的柔性与弹性特质,是构建柔弹性压力传感器基底材质的优良选择,逐渐成为柔性传感器领域的新兴研究热点。基于此,本文综述了柔弹性凝胶基压力传感器的最新研究进展。首先,概述了水凝胶、离子凝胶和气凝胶三类凝胶材料的组成与结构分类、新颖独特性质和制备思路方法;其次,对比分析了压阻式、电容式、压电式和摩擦电式四类压力传感器的工作机理和各自的凝胶化发展方向;然后,全面且详细地介绍了基于三种不同凝胶材料柔弹性压力传感器的具体研究工作进展,涵盖了电子皮肤、运动捕捉、健康管理、康复医疗和人机交互等前沿领域应用;最后,梳理出了目前领域仍然存在的挑战性难题,并展望了未来的技术发展方向。
导读
柔性传感器是穿戴健康设备的关键元器件,现有的柔性传感器仍然存在柔弹性不佳、生物相容性差和不具有粘附性等弊端,阻碍了其实用化进程。凝胶,作为典型的柔性软材料,不仅具有优异的柔性和可拉伸性,还展现出透明、生物兼容、自粘附、自愈等新颖特性,是构建新型柔性传感器的良好基材。近些年,柔弹性凝胶基压力传感器逐渐成为新的研究热点。
正文
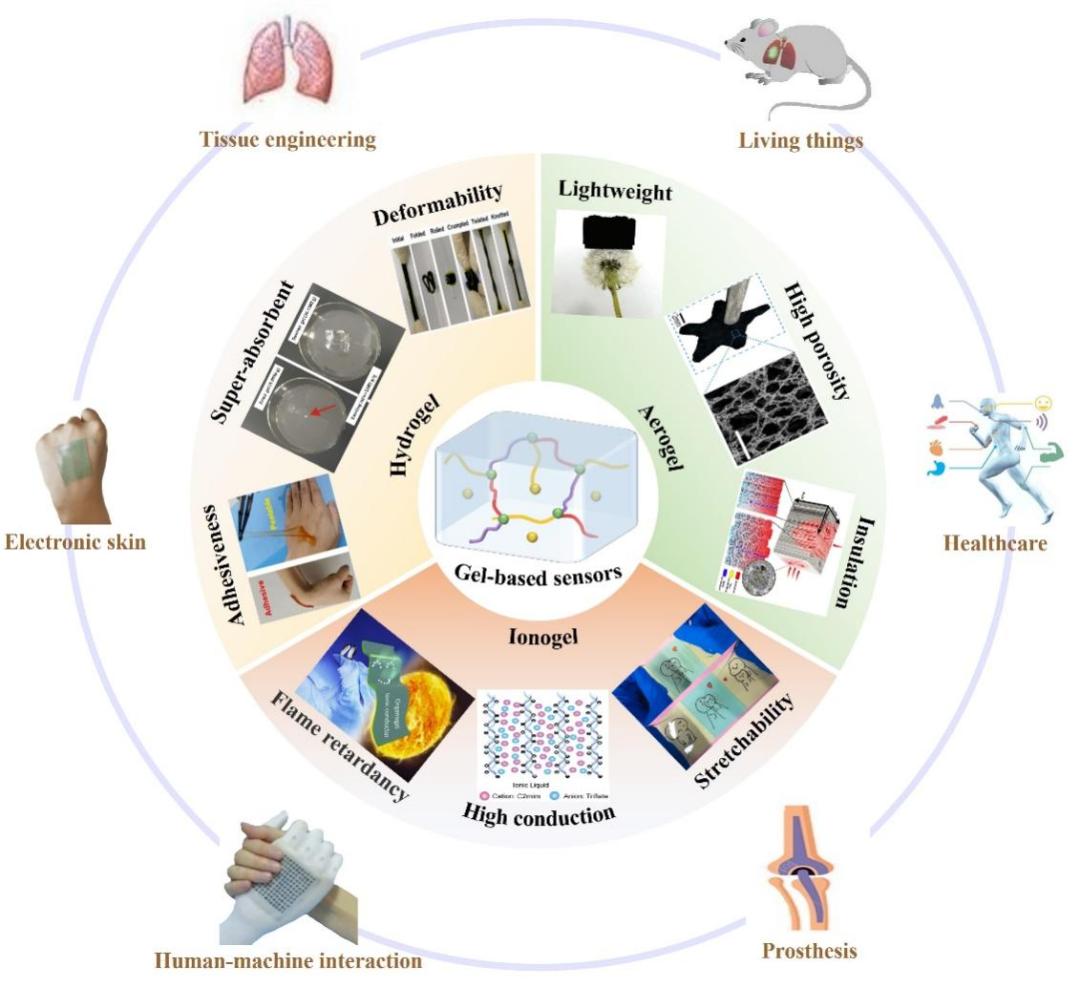
近些年,得益于纳米功能材料和高分子弹性体材料等技术的快速发展,各式各样的柔性传感器被研发出来,这使得穿戴式健康设备的开发成为可能。但是,现有的柔性传感器在实穿测量应用方面,还存在一些弊端亟需解决。例如,将AgNW、CNT、MXene等纳米功能材料作为导电填料分散于PET、PI、PDMS等高分子基材内,可在一定程度上实现敏感材料的柔性和弹性形变,但是仍无法承受较大的机械应变,这限制了其在监测大变形拉伸或弯曲方面的应用;上述高分子基材的生物相容性较差,与皮肤长时间紧密接触会引起皮肤发炎症状,如发红、肿胀等;上述高分子基材完全干爽且不具备粘性,无法紧密地贴附于柔软且多变的皮肤表面上,从而导致传感信号的不准确测量。与之相比,凝胶是一类典型的柔性软材料,不仅具有优异的柔性和拉伸性,还具有光学透明性、生物相容性、自粘附和自愈能力等新颖特性。近些年,科研工作者基于凝胶材质研发出新型的柔弹性传感器,除了增强的柔性和可拉伸性以外,还实现了传统柔性传感器所不具有的新颖特性,如图1所示。目前,柔弹性凝胶基压力传感器的研究已经成为有前景的新兴发展方向,产出了大量的具体研究工作,因此本文旨在综述相关领域的阶段性研究进展。
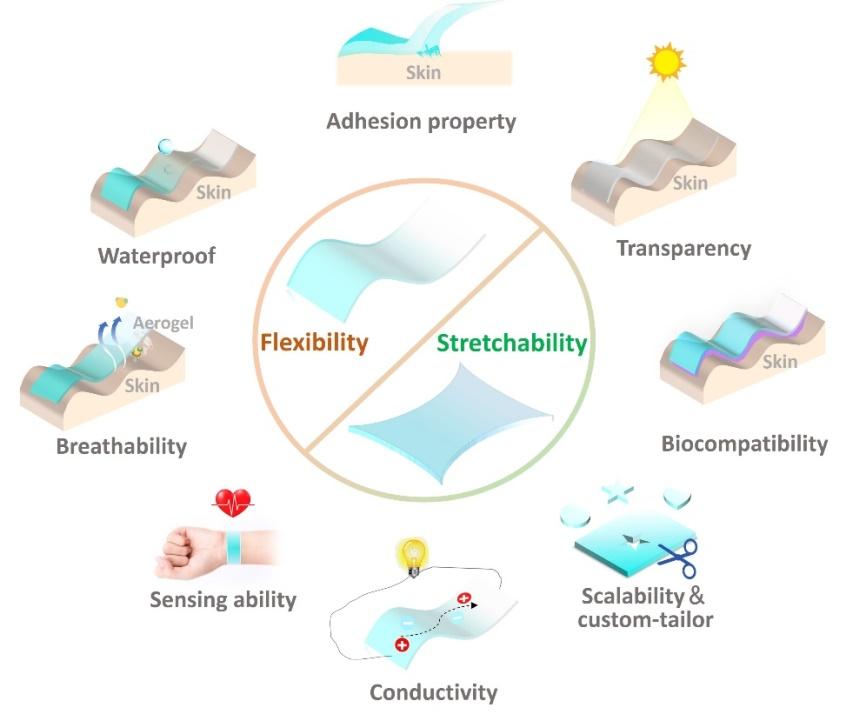
图1. 凝胶类材料及器件的独特性质
在广泛意义上来说,根据其组成成分与结构,凝胶可以分为水凝胶、离子凝胶和气凝胶三类。如图2所示,凝胶是由三维交联的高分子链网络(即固体成分)和许多内部开放通孔组成的柔性软材料,并在其内部填充有溶剂(即液体成分,例如,水凝胶和离子凝胶)或空气(即气体成分,例如,气凝胶)。不同的组成成分与结构决定了三类凝胶材料的不同性质,且对应的制备方方法也不同(图3)。在实际研发过程中,科研工作者需要根据柔性传感器的不同应用场景需求,来选择满足特定性质条件的凝胶材质和采用相配套的制备方法。在压力传感器方面,根据传感机理,研究大多集中于压阻式、电容式、压电式和摩擦电式四类传感器。先对四类传感机理进行了介绍,并分析比较了各自的优缺点,而后总结概述了四类器件结构在凝胶柔性化发展方面的研发思路。
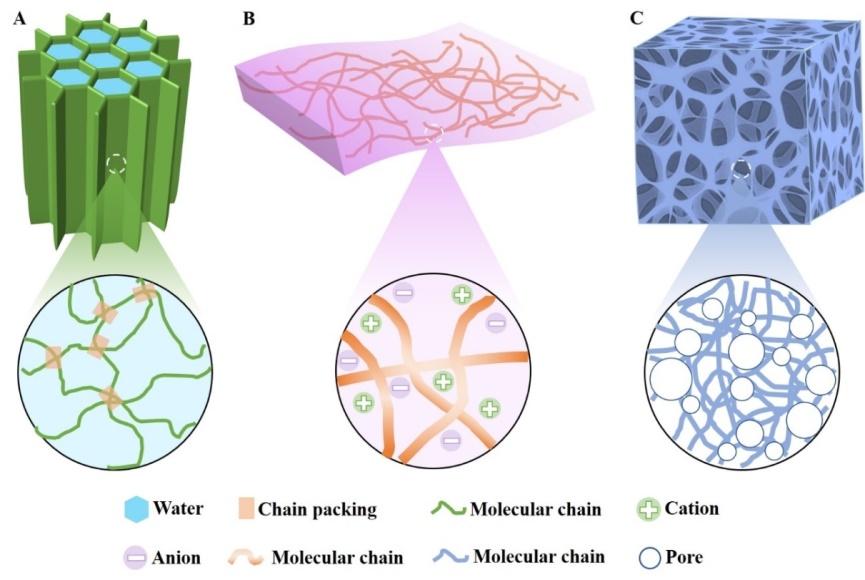
图2. 三类凝胶材料的成分与结构示意图:A)水凝胶;B)离子凝胶;C)气凝胶
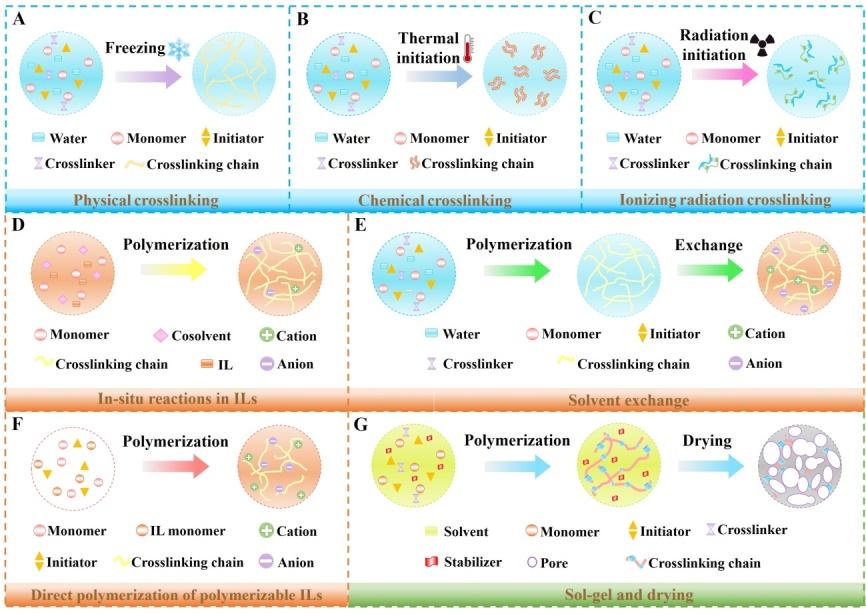
图3. 凝胶材料的制备方法示意图:水凝胶:A)物理交联;B)化学交联;C)离子辐射交联;离子凝胶:D)高分子原位聚合;E)溶剂置换;F)离子液体自聚合;气凝胶:G)溶胶-凝胶的干燥
最后,根据水凝胶、离子凝胶和气凝胶的分类,详细介绍了柔弹性凝胶基压力传感器的代表性具体研究工作进展,涉及材料选择、器件结构、制备方法、性能测试和应用展示等全面研究内容的总结与梳理,涵盖电子皮肤、运动捕捉、健康管理、康复医疗和人机交互等前沿领域。
展望
近些年,柔弹性凝胶基压力传感器成为研究热点,呈现出快速发展的态势。但是,仍存在诸多挑战性问题需要解决:1)在传感性能方面需要考虑灵敏度与检测范围之间的平衡,较高的灵敏度通常需要制造微结构来实现,但是将在一定程度上削弱线性度和检测范围,这对于凝胶基压力传感器尤其如此。2)需要根据具体应用场景需求来选择合适的凝胶材料类型,例如,水凝胶的生物相容性好但是易失水,而离子凝胶的形态保持性好但是生物相容性较差,因此仍需要材料研发以克服凝胶材料固有缺点。3)针对凝胶基传感器的自愈合特性,需要改进自愈的时间、效率以及愈合激励的方式,以实现快速且稳定的传感性能愈合。4)由于凝胶材料固有的高弹特性和液体组成成分,很难采用常规的微纳加工手段对其进行图案化和微型化加工制备,也阻碍了高空间分辨率凝胶基传感阵列的制备实现,因此亟需开发出有效的凝胶基传感器的微加工方法与手段。5)柔性传感器已经由单一传感功能向着多指标监测多功能传感的方向发展,因此也需要研发多功能凝胶基传感器以满足实际应用需求。
基金支持
本研究工作由河北省自然科学基金创新研究群体基金(No. A20202002)资助。
通讯作者介绍
孟垂舟,博士,河北工业大学机械工程学院教授,博士生导师,国家级青年人才,研究方向为基于纳米材料与高分子弹性体的敏感材料制备研究和穿戴式传感器在健康监测、运动识别、康复评价和人机交互等前沿方向的应用研究。
郭士杰,博士,河北工业大学机械工程学院教授,博士生导师,国家级人才,教育部智能康复装置与检测技术工程研究中心主任、河北省机器人感知与人机融合重点实验室主任,研究方向包括智能护理床、护理机器人、康复机器人、柔性外骨骼机器人、仿生电活性人工肌肉、机器人触觉传感皮肤、人体生理与运动信息监测、人机交互与协调控制等。
引用此文
Sun G, Wang P, Jiang Y, Sun H, Meng C, Guo S. Recent advances in flexible and soft gel-based pressure sensors. Soft Sci 2022;2:17. http://dx.doi.org/10.20517/ss.2022.16
全文链接:https://softscijournal.com/article/view/5176
厦门柔性电子研究院
福建省协同创新院柔性电子产业技术分院
地址:厦门市集美区集美大道1995号科技成果转化加速器1期4F
邮编:361024 电话:0592-5366222 邮箱:admin@flex-elec.com
部分图片来源于网络,如有侵权请联系删除