
研究背景
最近,随着智能社会和智能机器人的快速发展,传统的人机交互媒体在满足各种需求的灵活性、便携性和功能性方面面临着挑战。新的交互媒体在人类直接获得感官信息方面取得了重大进展,如电、光、声和视觉辅助。可见光反馈由于其安全性、直观性和高响应性而被认为是一种有前途的交互方法。更重要的是,这种方法在具有高空间分辨率的触觉成像方面具有独特的技术优势,如电致发光材料很容易与交互媒介兼容,不需要额外的精制过程。因此,具有光反馈的触觉传感器在各个领域都获得了相当的关注。
研究成果
具有可见光反馈功能的触觉传感器,如可穿戴显示器和电子皮肤及生物医学设备,在各个领域都变得越来越重要。然而,现有的方法由于其有限的光映射性能和不足的便携性,无法满足强度反馈的触觉感知和扩展交叉的应用要求。在此,广西大学聂双喜教授团队提出了一种可自由构建的自供电视觉触觉传感器,它由一个高输出的摩擦纳米发电机(TENG) 和一个视觉光源组成。通过摩擦静电材料和装置的结构设计,TENG的转移电荷增强到746 nC,可以轻松驱动光源产生亮度为9.8 cdm-2的光信号。TENG的应用能够实现对手掌抓握状态的视觉感应和强度反馈,而无需外部电源。这些视觉反馈和无电源触觉传感器有望在人工智能领域有潜在的应用,作为智能防护服和机器人的新互动媒介。相关研究以“Wearable Triboelectric Visual Sensors for Tactile Perception”为题发表在最新一期的Advanced Materials期刊上。
图文导读
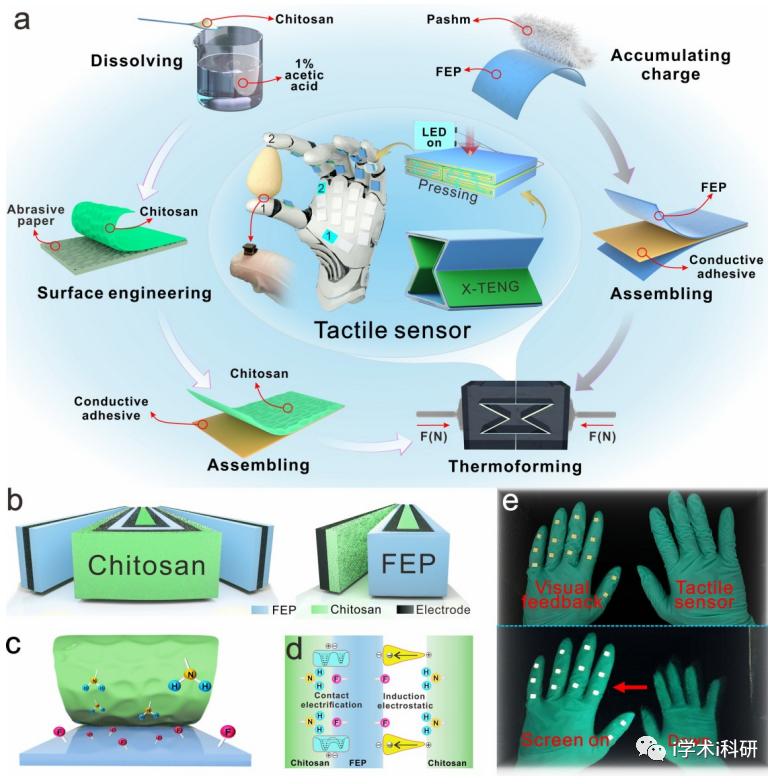
Figure 1. X-TENG for the wearable visual tactile sensors.
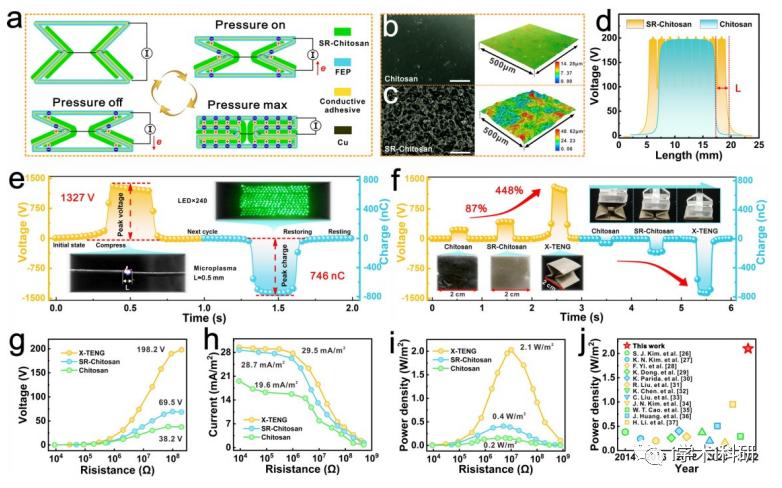
Figure 2. Working mechanism and performance of the X-TENG.
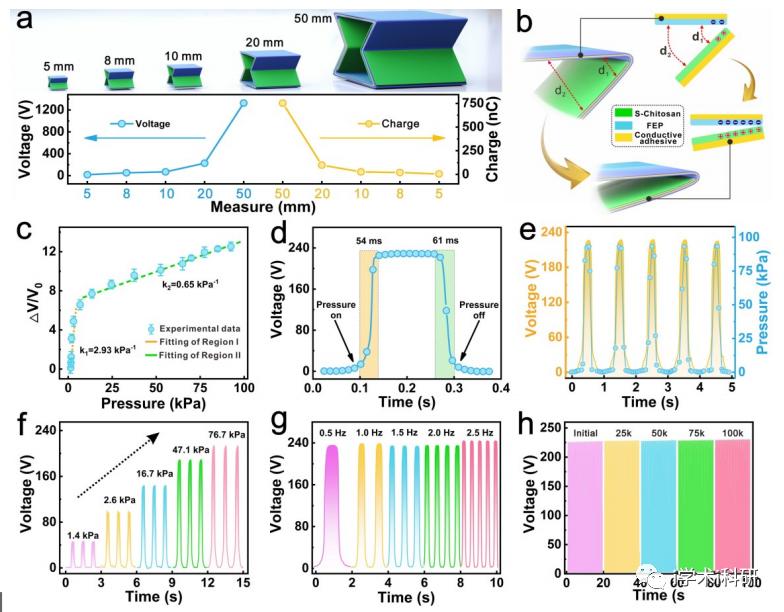
Figure 3. Pressure response performance of the X-TENG.

Figure 4. Active array integrated X-TENG visualization sensing performance.
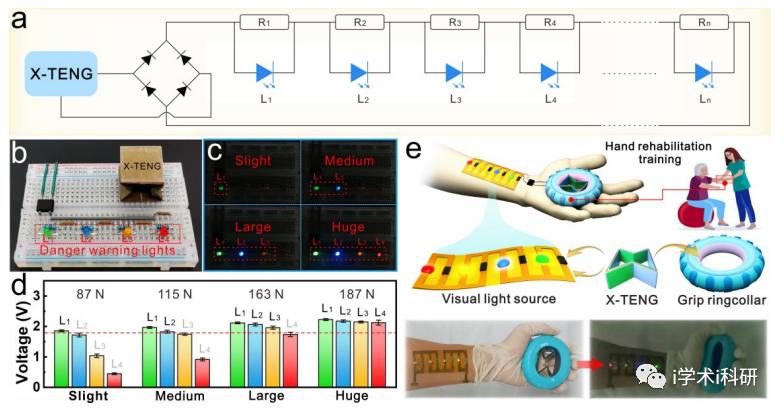
Figure 5. Visual sensors are used for hand training.
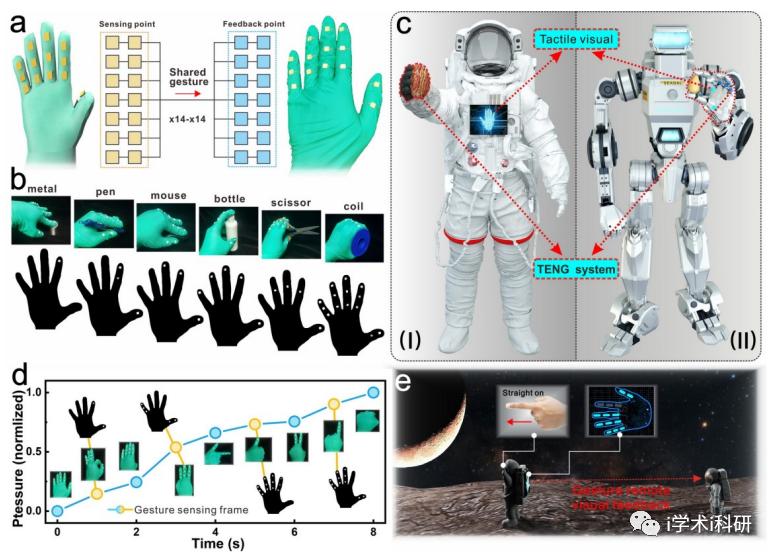
Figure 6. Application of integrated visual tactile sensors on the glove.
总结与展望
总之,本研究提出了一种用于视觉传感的可穿戴式高性能X-TENG,它通过表面拓扑结构和折纸工艺为可穿戴式自供电触觉系统实现了前所未有的输出功率密度(2.1 Wm-2),并表现出优异的压力灵敏度(2.93 kPa-1)和电信号响应时间(51 ms)。由于用X-TENG制作的视觉传感器很容易将触摸刺激转换为可见光信号(9.6 cd m-2),因此X-TENG的高效和强大的能量采集被认为是可穿戴自供电系统的良好选择。可穿戴式传感模块和触觉光学反馈模块是通过有源矩阵的设计策略构建的,从而实现了无需外部电源的手掌抓握状态和力度反馈的视觉传感。展示了X-TENG在视觉传感方面的效率和可扩展性,并展示了自供电的交互式视觉触觉传感器在人机交互方法中的应用潜力。
文献链接Wearable Triboelectric Visual Sensors for Tactile Perceptionhttps://doi.org/10.1002/adma.202209117
厦门柔性电子研究院
福建省协同创新院柔性电子产业技术分院
地址:厦门市集美区集美大道1995号科技成果转化加速器1期4F
邮编:361024 电话:0592-5366222 邮箱:admin@flex-elec.com
部分图片来源于网络,如有侵权请联系删除