
研究背景
柔性触觉传感器在电子皮肤、智能机器人、可穿戴和植入式生理监测和治疗领域均具有很大的潜力。与传统的触觉传感器件相比,柔性可穿戴式触觉传感器件的突破了传统刚性脆性材料的机械束缚,具有超轻、超薄的特点,并且具有较大的柔性,能够在保持正常性能的前提下进行弯曲、折叠、压缩或拉伸等机械变化。柔性电子皮肤主要是基于压阻、压电电容、压电效应等机制。这些传感器可以感知外部环境中的压力、应变、剪切力、扭转变形等刺激,并将这些物理刺激转换为模拟电子信号,从而实现对外部刺激的准确有效测量和监测。在实际的触觉测量中,切向力和法向力的检测同样重要,因为切向力的检测为识别表面地形提供了更有用的信息,这将更接近于自然接触的高级感知。然而,对于目前的柔性压敏电子皮肤来说,对能够检测到表面各种程度的粗糙度的柔性触觉传感器的研究是有限的。
研究成果
上海高等研究院曾祥琼研究员团队设计了一种带有石墨烯-聚二甲基硅氧烷(PDMS)微球的3D打印柔性触觉传感器,用于微结构感知。该触觉传感器的结构受到人类手指纹理的启发,旨在通过对触觉信号的处理实现对不同程度的表面粗糙度的检测。具有独特的石墨烯-PDMS微球结构的触觉传感器显示出优异的综合机械性能,包括强大的拉伸能力(感应层的断裂伸长率为70%)、出色的感应能力(60 ms的短响应时间)、高灵敏度(灵敏度高达2.4 kPa-1)和循环稳定性(超过2000次加载循环)。此外,这样的多功能性和灵敏度使电子皮肤不仅能够准确地监测压力,且能区分具有微观差异的各种表面形貌,并检测空气流体的作用。相关研究工作以“Highly Sensitive Flexible Tactile Sensor Mimicking the Microstructure Perception Behavior of Human Skin”为题发表在ACS Applied Materials & Interfaces期刊上。
研究亮点
1. 介绍了一种新方法,用石墨烯-PDMS微球制造一种用于微观结构感知的柔性压阻传感器。2. 该传感器在监测具有不同形貌的不锈钢表面时具有很高的灵敏度,并能准确区分表面形貌,呈现出良好的传感能力,响应时间短(60 ms),灵敏度高(低压下可达2.4 kPa-1),循环稳定性好。
图文导读
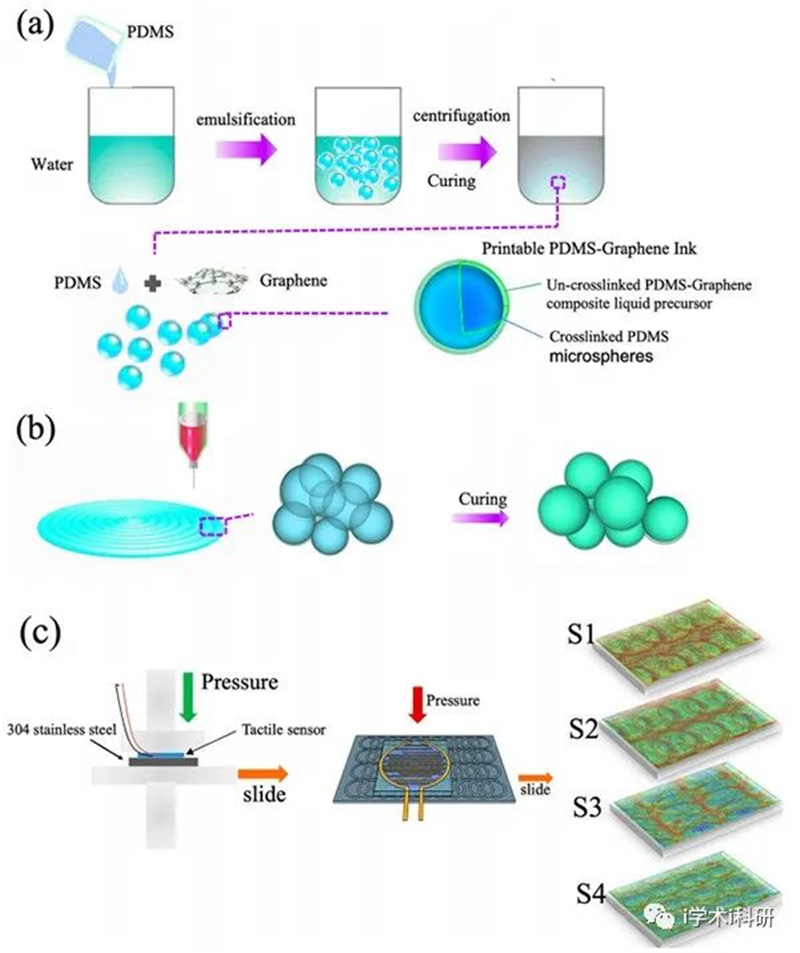
图1| 触觉传感器的设计原理及打印过程。
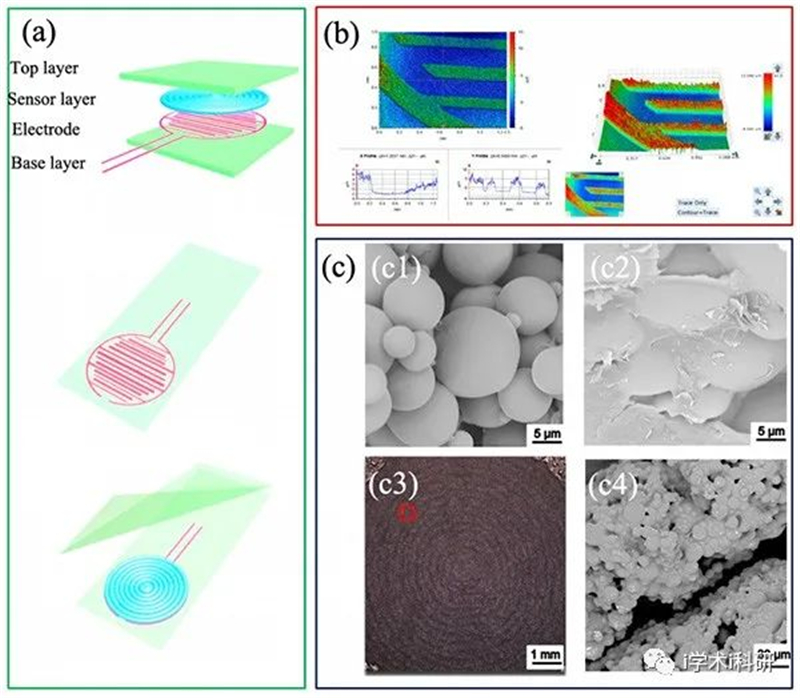
图2| (a)触觉传感器示意图及材料形貌表征。
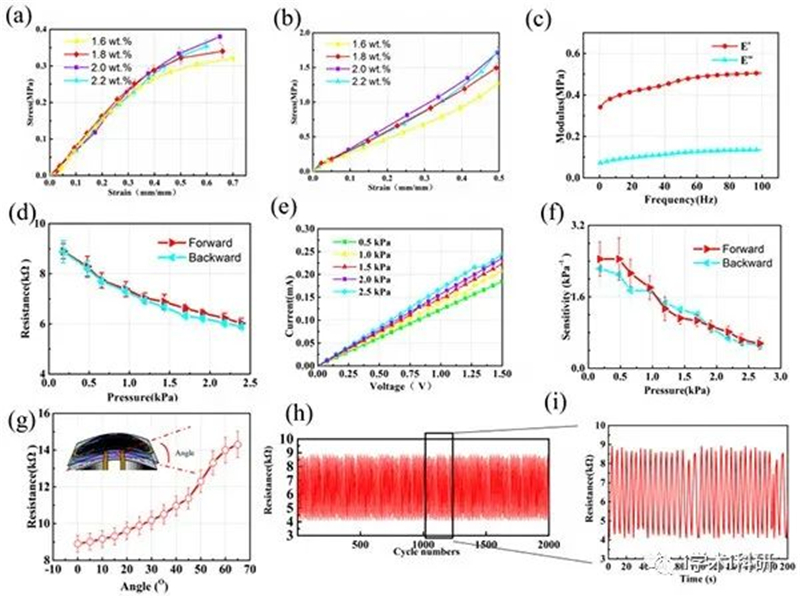
图3| 传感器的性能测试。
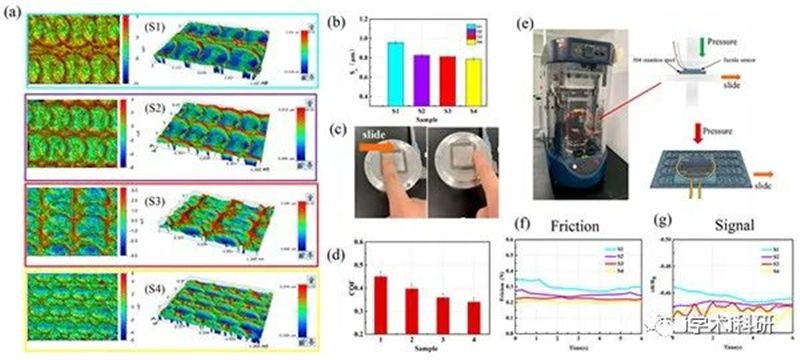
图4| 传感器表面纹理形貌及信号测试。
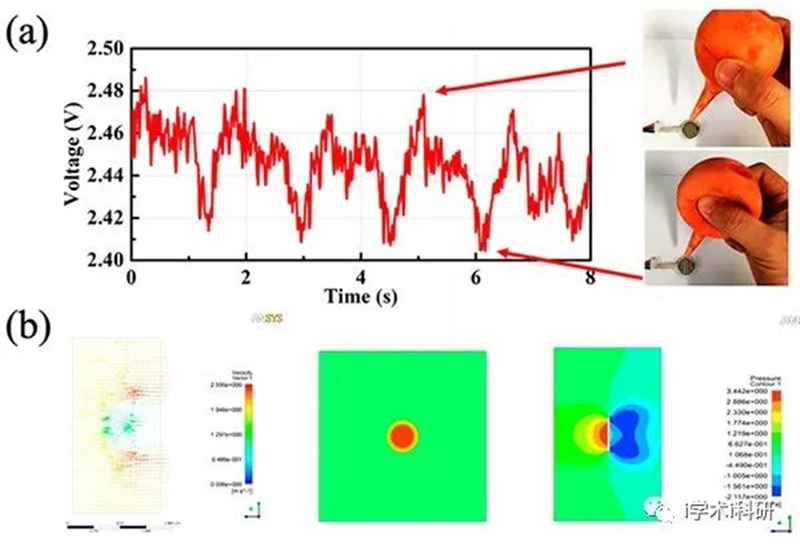
图5| 环境中信号测试及模拟结果。
总结展望
综上所述,作者描述了一种新的方法,用石墨烯-PDMS微球制造一种用于微观结构感知的柔性压阻传感器,它是通过模仿人类手指的指纹来设计的。该传感器具有与人类皮肤类似的功能,可以在微观上区分表面的差异。结果表明,该传感器在监测具有不同形貌的不锈钢表面时具有很高的灵敏度,并能准确区分表面形貌。该传感器呈现出良好的传感能力,响应时间短(60 ms),灵敏度高(低压下可达2.4 kPa-1),循环稳定性好。风载荷实验结果表明,该传感器可以有效地对气体和其他液体作出反应。该研究不仅将传感器技术扩展到电子皮肤,而且还扩展到其他应用,如气流监测和无人潜水器的包装。
文献链接
Highly Sensitive Flexible Tactile Sensor Mimicking the Microstructure Perception Behavior of Human Skin, ACS Appl. Mater. Interfaces, DOI: 10.1021/acsami.1c04079
https://doi.org/10.1021/acsami.1c04079
厦门柔性电子研究院
福建省协同创新院柔性电子产业技术分院
地址:厦门市集美区集美大道1995号科技成果转化加速器1期4F
邮编:361024 电话:0592-5366222 邮箱:admin@flex-elec.com
部分图片来源于网络,如有侵权请联系删除