
研究背景
人类的皮肤由一个综合的感觉感受器网络组成,向大脑传递关于机械和热刺激的信息,使我们能够有效和安全地在周围环境中进行操作。对人类皮肤的模仿代表了一个新兴的、有前途的方向,即实现仿人机器人、仿生物假肢和人工智能。在过去的几十年里,许多人致力于增强人工皮肤的机械和热感应能力,重点是开发对多种刺激有反应的多功能材料,或将各种感觉单元安排在一个混合系统中。例如, 有机半导体与晶体管或电容器结构相结合,被确定为压力和热传感器的大规模矩阵;碳纳米材料(碳纳米管、石墨烯等)与纱线的形式。纱线、海绵和微结构等形式的碳纳米材料被开发出来,用于灵活地感应压力和温度;金属渗流或网状物被制成具有压力和温度感应的透明面板;具有设计的联锁结构的铁电复合材料证明了压力和温度感应的增强或自供电。含有导电填料的水凝胶被提议用于压力和温度的自愈和传感;以及与蛇形电极相连的单个压力和温度传感像素被应用于创建多功能传感的可拉伸阵列。尽管取得了欣欣向荣的进展,这些双模传感器产生的对温度和压力的反应信号是相似的,如电阻、电容、电压或电流的相对变化。这些信号往往是融合的,从而妨碍了它们在实时监测温度和压力方面的应用,并具有必要的分辨力,需要后续的信号分离算法或计算。因此,在不涉及复杂算法和计算的情况下,能直观且无干扰地读取多个触觉信号对于当前传感器而言仍然是一个挑战。
成果简介
北京纳米能源所潘曹峰研究员与深圳大学王春枫等人展示了一种没有任何干扰的压力温度双模触觉传感器,它结合了光学和电子学的基本不同的传感机制,实现了对压力和温度的同时独立传感,消除了信号分离算法和计算。该双模传感器由ZnS-CaZnOS的机械发光混合体和聚(3,4 亚乙=氧基噻吩) :聚(苯乙烯磺酸盐) (PEDOT:PSS) 抗热材料组成,分别将压力和温度毫不含糊地转变成光学和电信号。该装置在21-60°C范围内表现出最高的温度灵敏度-0.6%°C-1,并在2N的低限制下对施加的力进行视觉感应。该装置的无干扰和发光特性允许用户在机器人中进行加密通信、温度和压力监测以及无线信号传输。这项工作为多模态触觉传感器的信号干扰提供了一个未被探索的解诀方案,它可以扩展到其他多功能传感设备。相关研究以“Bimodal Tactile Sensor without Signal Fusion for User-Interactive Applications”为题发表在ACS Nano期刊上。
研究亮点
1、 提出了一个无干扰的双模触觉传感器,通过结合根本不同的电阻和发光的变量来感知压力和温度。2、 压力通过ZnS-CaZnOS机械发光(ML)混合体的压电/摩擦光子效应进行视觉识别,而温度感应则通过PEDOT:PSS的热阻效应实现。3、 该装置的信号自我区分和发光功能不仅保证了用户与机器人的视觉互动,而且还能通过开发的移动电话应用实现压力和温度的无线感知反馈。
图文导读
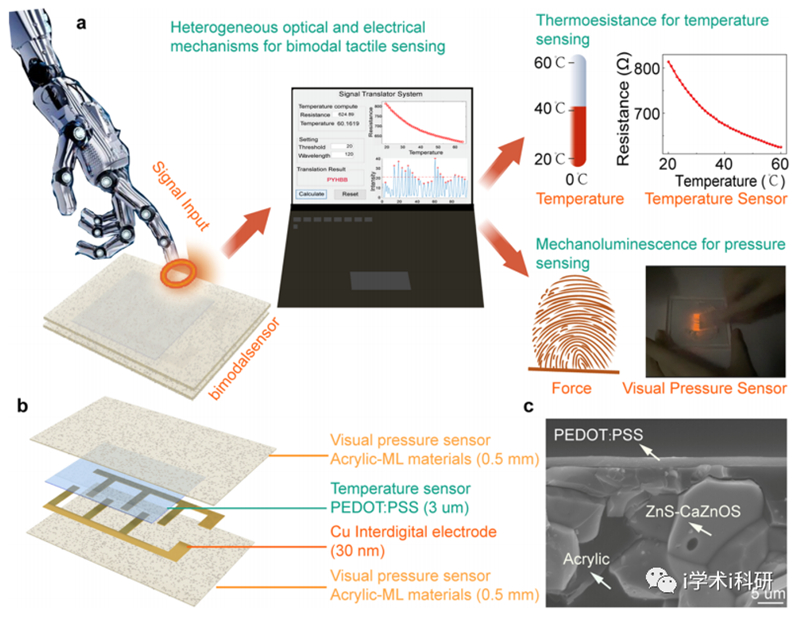
Figure 1. Heterogeneous optical and electrical mechanisms for pressure and temperature sensing.
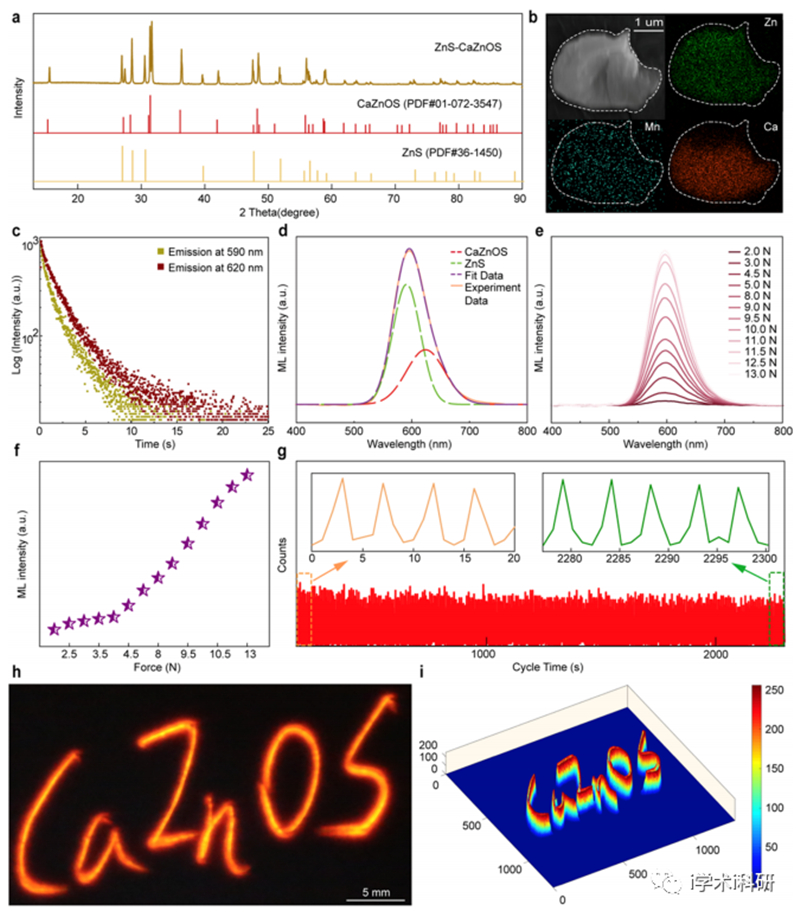
Figure 2. Single-mode pressure sensing by ML hybrids.
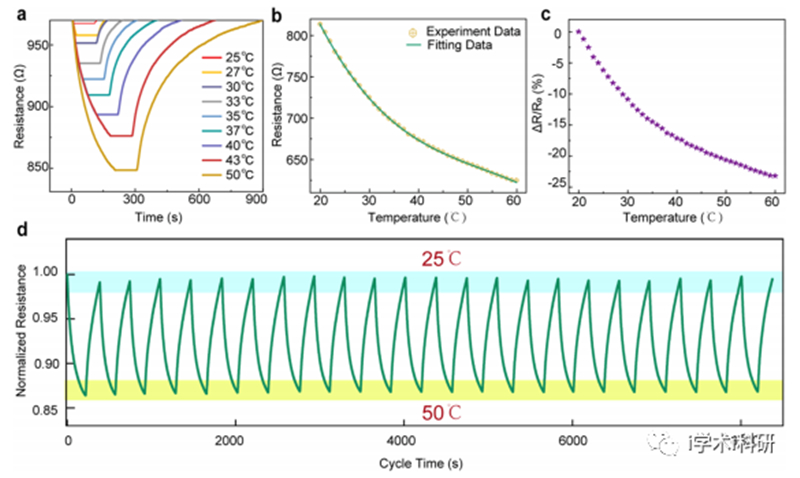
Figure 3. Single-mode thermal sensing by PEDOT:PSS.
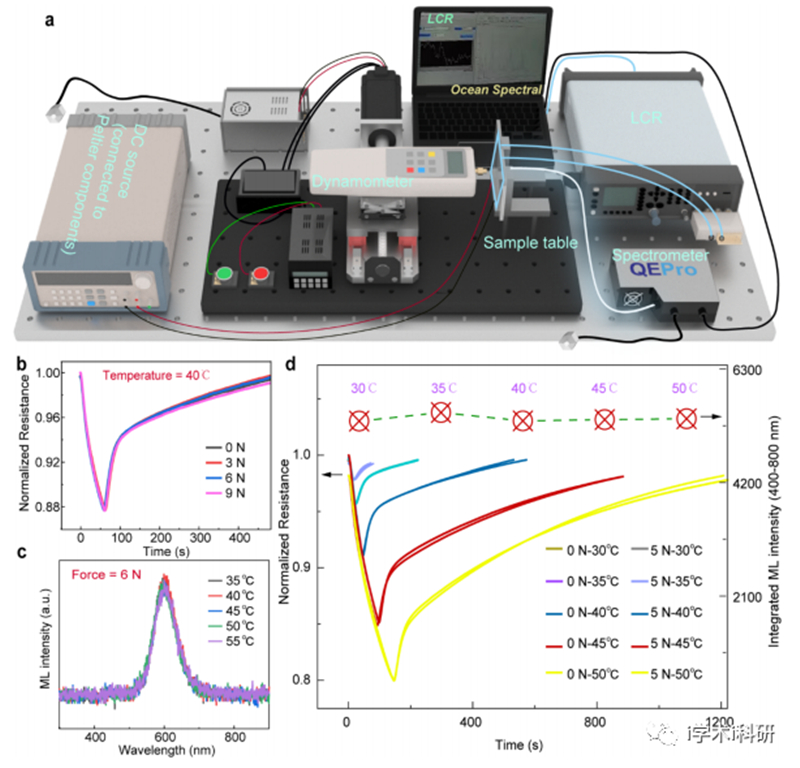
Figure 4. Bimodal sensing performance.
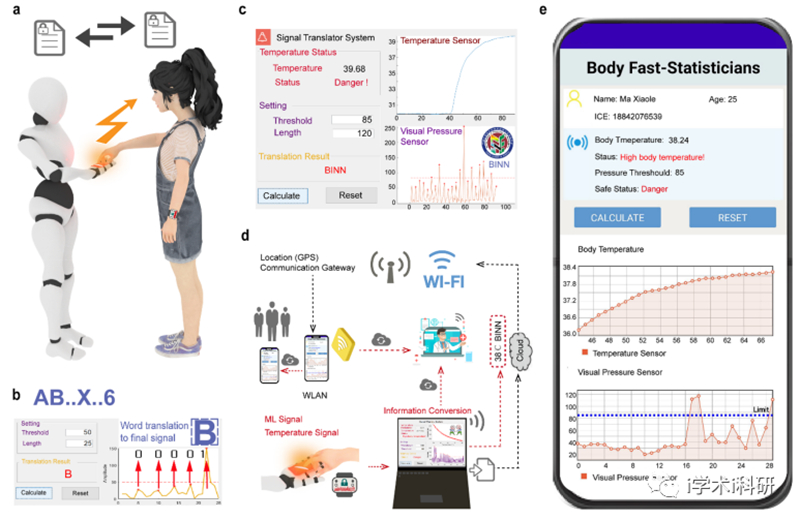
Figure 5. Bimodal sensor for user-interactive applications.
总结展望
作者展示了一种无需信号融合的温度和压力双模传感器,用于触觉传感和用户交互式应用。压电/摩擦光子和热阻效应的组合传感机制使机械和热刺激分别独立地转变成光学和电信号,温度灵敏度为-0.6%°C-1,力的检测限制为2N,演示了对外部刺激的感知和将压力转化为人形机器人的加密通信信息。开发了一个用于远程信息交互和健康监测的无线传感系统。这项工作激发了人们对由多种异质机制组成的多模态传感器的献身精神,以扩展传感和应用。
文献链接
Bimodal Tactile Sensor without Signal Fusion for User-Interactive Applications.
https://doi.org/10.1021/acsnano.1c09779
厦门柔性电子研究院
福建省协同创新院柔性电子产业技术分院
地址:厦门市集美区集美大道1995号科技成果转化加速器1期4F
邮编:361024 电话:0592-5366222 邮箱:admin@flex-elec.com
部分图片来源于网络,如有侵权请联系删除