
研究背景
人工智能(AI)和机器人技术的结合已经成为科学技术发展最快的分支之一,并被认为对人类社会产生了深刻的影响。为了模仿甚至超越人类手部的功能,机器人手在实际应用中需要能够处理周围复杂的压力环境。已经证明,人的手的优秀压力感知能力来自于人类皮肤中触摸感受器和气压感受器的协同策略。生长在人类皮肤表层的触摸感受器对细微的压力(低至≈1 Pa)敏感,而皮肤深层的气压感受器(环状体)可以忍受并感知较大的外部压力(100-300 kPa)。触摸感受器和气压感受器的协同作用使人类皮肤能够敏感地将细微和高压刺激转换成生物信号。作为机器人和周围环境的接口,机器人皮肤的压力感应部件也有望对细微的(如微风和触摸)和高压刺激敏感,使智能机器人能够实现精确的操纵。尽管如此,家用机器人没有出现在日常生活中的主要原因之一是压力传感要求没有得到满足,即缺乏相当于甚至超过人类皮肤的机器人皮肤。因此,非常希望开发出既具有极低检测限又具有较宽检测范围的压力传感材料,以创造相当于甚至超过人类皮肤的机器人皮肤。
研究成果
受人类皮肤中双机械感受器的协同策略的启发,苏州大学江林、梁志强教授等人展示了由超薄和厚壁细胞微结构组成的层状石墨烯压力感应材料的设计和3D打印。基于这种层状石墨烯,压阻式压力传感器实现了1 Pa的低检测限、宽检测范围(1 Pa-400 Pa),以及在1 Pa -13 kPa和13-400 kPa的压力区域分别达到3.1和0.22 kPa-1的高灵敏度,而且层状石墨烯基皮肤可以实现定量的压力/重量检测。这种层状石墨烯可以很容易地集成到灵活的压力传感阵列中,能够绘制压力的空间分布图,显示出在电子皮肤、生理信号监测和人机界面等应用方面的巨大潜力。相关研究以“Beyond Skin Pressure Sensing: 3D Printed Laminated Graphene Pressure Sensing Material Combines Extremely Low Detection Limits with Wide Detection Range”为题发表在Advanced Functional Materials期刊上。
研究亮点
1. 展示了由超薄壁和厚壁细胞微结构层组成的层状石墨烯压力感应材料的设计和3D打印。基于墨水的3D打印的出色灵活性和可控性能够将不同的微结构打印成无缝的层状石墨烯材料。2. 这是首次展示超越人类皮肤压力感应范围的碳基压力传感器。3. 基于这种层状石墨烯,压阻式压力传感器实现了1 Pa的低检测限、宽检测范围(1 Pa-400 Pa),以及在1 Pa -13 kPa和13-400 kPa的压力区域分别达到3.1和0.22 kPa-1的高灵敏度,而且层状石墨烯基皮肤可以实现定量的压力/重量检测。4. 证明了这种层状石墨烯压力传感材料在集成大面积电子皮肤方面的可行性以及人工智能机器人能够定量地感知物体的重量以进行精确的操纵的潜力。
图文导读
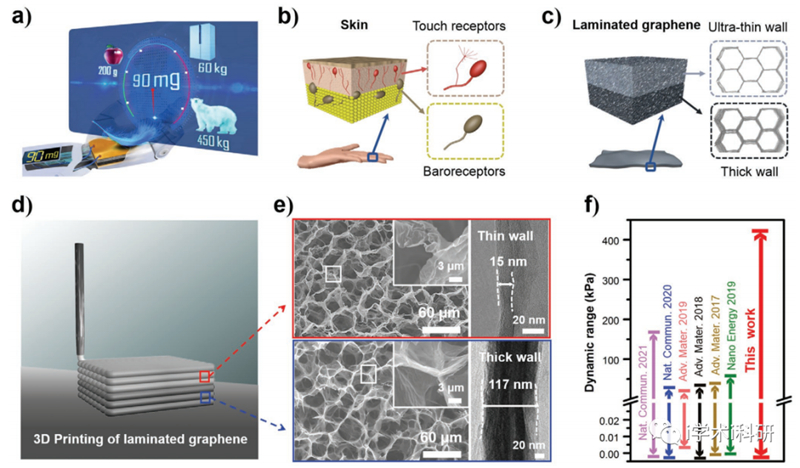
Figure 1. 3D printed laminated graphene pressure sensing materials with different cellular microstructures.
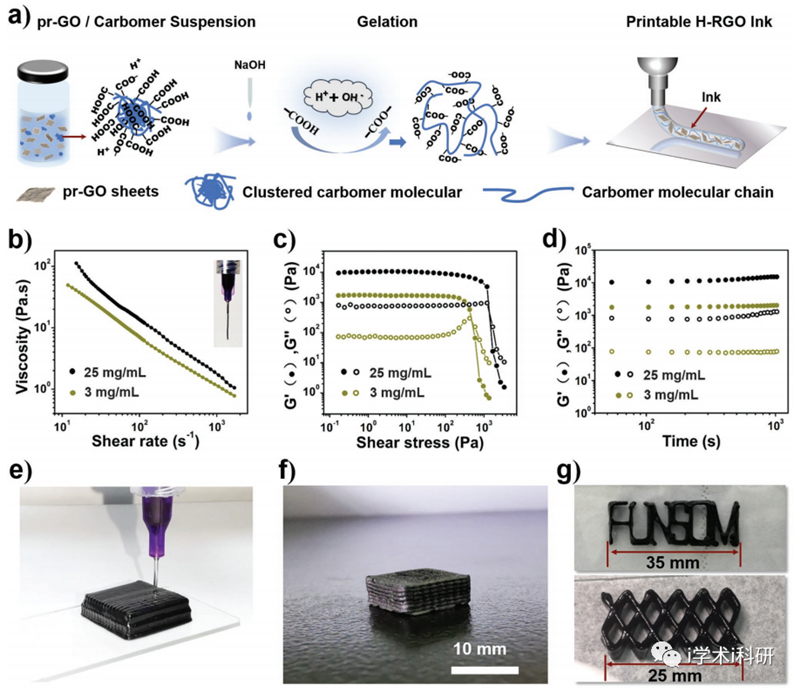
Figure 2. Preparation and rheological properties of H-RGO inks and 3D printing of laminated graphene.
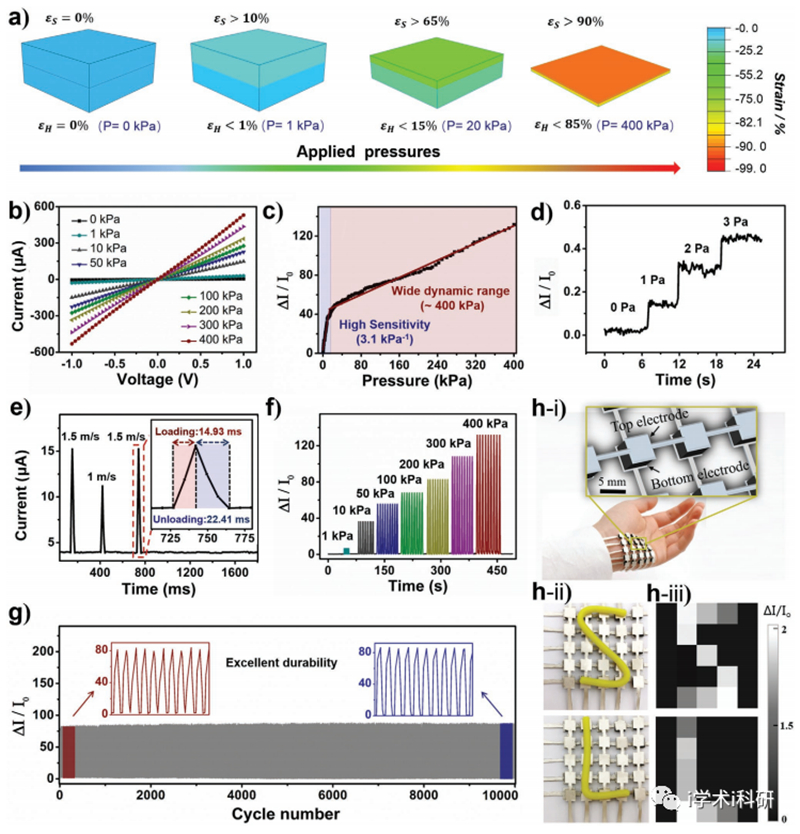
Figure 3. a) Strain calculation of laminated graphene under applied pressures, showing the responses of thin-walled (top) and thick-walled cellular layers (bottom) to different applied pressures. b) I–V curves of the pressure sensor under different applied pressures. c) Pressure-response curve for the pressure sensor, exhibiting a pressure sensitivity of ≈3.1 kPa−1 in the low-pressure regime (<13 kPa) and ≈0.22 kPa−1 in the high-pressure regime (13–400 kPa). d) The step response of the sensor with loading pressures of 1, 2, and 3 Pa. e) Pressure sensor under wind loads. f) Stable relative cur rent variation of the pressure sensor over a wide pressure regime (1–400 kPa) with multiple cycles of loading/unloading. g) The reliability test of the device through 10000 loading/unloading cycles at a pressure of 200 kPa showed excellent long-term device stability. h-i) Photograph of a flexible 5 × 5 pressure-sensor array placed on the hand and a schematic diagram of the device structure. h-ii) Photographs of letters “S” and “L” on the surface of the pressure-sensor array. h-iii) Current mapping of pressure distributions in (h-ii).
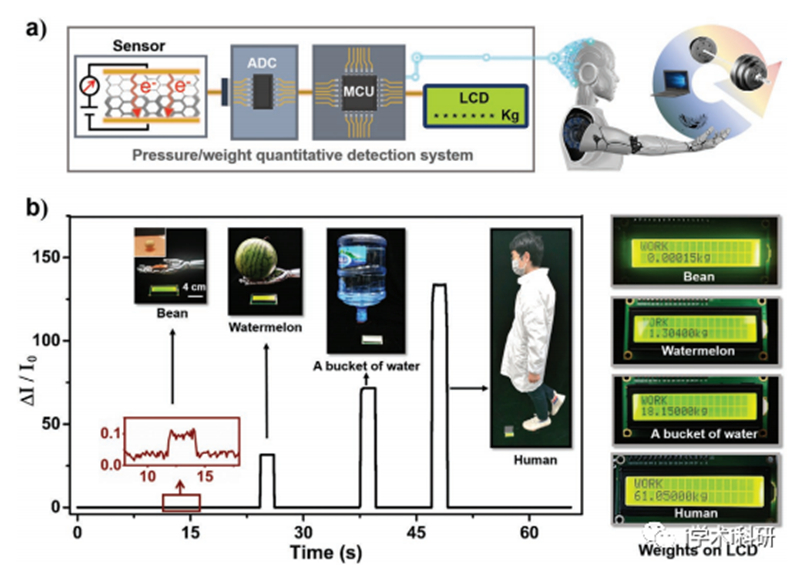
Figure 4. Weight quantitative detection devices integrated by 3D printed laminated graphene pressure sensing material.
总结与展望
综上所述,设计并打印了受皮肤启发的层状石墨烯压力感应材料,包括弹性模量很低的柔软超薄壁细胞层和弹性模量较高的相对坚硬的厚壁细胞层。超薄壁细胞微结构(作为人类皮肤中的触摸感受器)由于其非常低的弹性模量,被探索用来感知细微的压力,而具有高弹性模量的厚壁细胞结构被用来作为皮肤中的气压感受器,检测大的压力刺激。使用这种层状传感材料制备的压力传感器既实现了低至1帕的极低检测限,又实现了较宽的检测范围(1 Pa-400 kPa),而且在低(1 Pa -13 kPa)和高(13-400 kPa)压力区间的灵敏度分别高达3.1和0.22 kPa-1。此外,蜂窝状的微观结构和PDMS涂层处理使层状石墨烯具有超过10000次操作的优良耐久性。此外,这种层状石墨烯压力感应材料显示了被集成到柔性和大面积电子皮肤中的可行性。基于这种层状石墨烯制备的机器人皮肤展示了在大范围内定量检测和显示重量/压力的能力。这种受皮肤启发的材料结构设计理念与基于柔性墨水的3D打印策略相结合,为智能机器人的高性能压力传感设备的开发提供了一个很好的途径。此外,这种3D打印的压力传感材料可以很容易地用于各种应用,如生理状况和运动活动监测,其中既需要低检测限又需要宽检测范围。
文献链接
Beyond Skin Pressure Sensing: 3D Printed Laminated Graphene Pressure Sensing Material Combines Extremely Low Detection Limits with Wide Detection Range, Adv. Funct. Mater. 2022, 2202360, DOI: 10.1002/adfm.202202360.
https://doi.org/10.1002/adfm.202202360.
厦门柔性电子研究院
福建省协同创新院柔性电子产业技术分院
地址:厦门市集美区集美大道1995号科技成果转化加速器1期4F
邮编:361024 电话:0592-5366222 邮箱:admin@flex-elec.com
部分图片来源于网络,如有侵权请联系删除