
研究背景
伴随着"人工智能"时代的出现,人们对智能服务机器人的需求越来越大,功能强大的机器人正逐步提供更多的智能服务。机器人可以专注于结合多种类型的传感器来感知和解释环境。触觉感应是最常见和最重要的感应功能之一。由于研究人员的稳步努力,机器人触觉传感器的功能已经变得更接近于人体的功能。除了对人类触觉功能的模仿外,作为一种新的载体,机器人的触觉传感器可以通过引入新的技术手段,尝试实现一些人类触觉无法达到的新功能。物体识别的功能仅靠人的手指是无法实现的,还需要视觉和其他感官的共同作用。
基于接触电气化和静电感应相结合的摩擦纳米发电机(TENGs)在自供电传感器领域表现出许多有前途的应用。首先,材料选择的多样性和简单的结构设计决定了其成本效益。其次,诱导电信号的即时输出有利于减少电力消耗。此外,接触分离模式、滑动模式、单电极模式、独立式三电层模式等多样化的工作模式,以及集成性和扩展性,都有利于大规模生产和应用。特别是在触觉感应方面,各种基于TENG的自供电传感器已经被开发出来。尽管摩擦静电传感器可用于各种应用,但由于TENG的输出性能易受室外环境的影响,很难利用TENG的电输出信号进行直接传感。因此,开发一种不仅能超越人类触觉功能,而且能有效规避外部环境和接触条件影响的摩擦静电触觉传感器势在必行。深度学习技术在许多技术行业的发展中被证明是非常有效的,并逐渐成为机器学习的一个非常流行的子类别。卷积神经网络(CNN) 在计算机视觉领域取得了前所未有的成功,出现了大量的优秀作品。卷积层可以自动提取TENGs的摩擦静电信号中更多的隐藏特征,为实现更好的识别功能提供了一个很好的解决方案。
研究成果
机器人感知可以在摩擦纳米发电机(TENG)的协助下,拥有人类仅使用孤立的触觉感知方法所无法达到的简单而有效的感知功能。然而,由于固有的环境限制,摩擦静电传感器的可靠性仍然是一大挑战。在此,北京纳米能源与系统研究所王中林院士、吴治峄研究员团队提出了一个结合TENG和深度学习技术的智能触觉感应系统。通过使用三波段触觉传感器(TTS) 阵列,即使在不同的接触条件下(触摸条件和外部环境条件),通过从三个独立的电信号以及归一化输出信号中提取特征,可以稳定地保持每种测试材料的典型特征。此外,还集成了一个卷积神经网络(CNN)模型,并在材料识别任务中取得了96.62%的高准确率。该触觉传感系统已经在一个开放的环境中进行了材料识别和实时演示。与人类必须整合多种感知(触摸和观看)以完成触觉感知的复杂过程相比,所提出的感知系统在视障人士的认知学习、生物仿生假肢和虚拟空间构建方面显示出巨大的优势。相关研究以“Open-Environment Tactile Sensing System: Towards Simple and Efficient Material Identification”为题发表在Advanced Materials期刊上。
研究亮点
1. 制作了一个触觉传感器(TTS) 阵列,由于掺杂材料不同,阵列中包含的任何一个单体触觉传感器(STS) 都是独一无二的。2. 通过深度学习技术,可以提取出肉眼或仅从外部无法分辨的更细微的特征差异。3. 提出了一个智能触觉传感系统,它结合了摩擦纳米发电机技术和深度学习技术,对开放环境中的物体接触作出准确的判断和预测。
图文导读
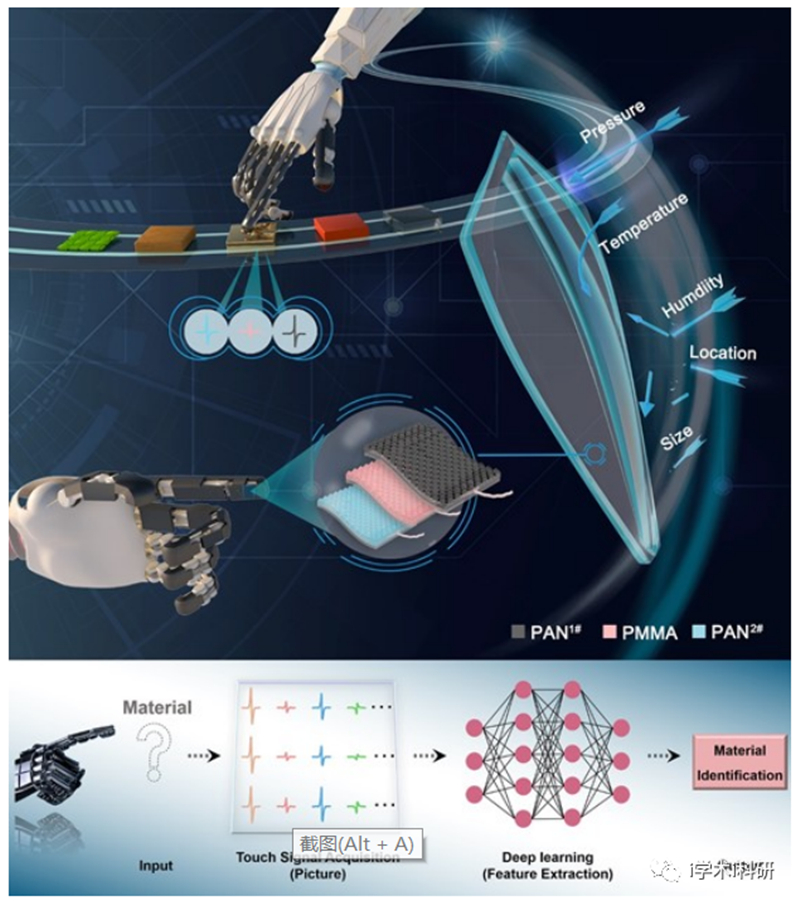
Fig. 1. An intelligent tactile sensing system based on triboelectric signals and deep learning to achieve accurate recognition under different contact conditions (touch conditions and environmental conditions).
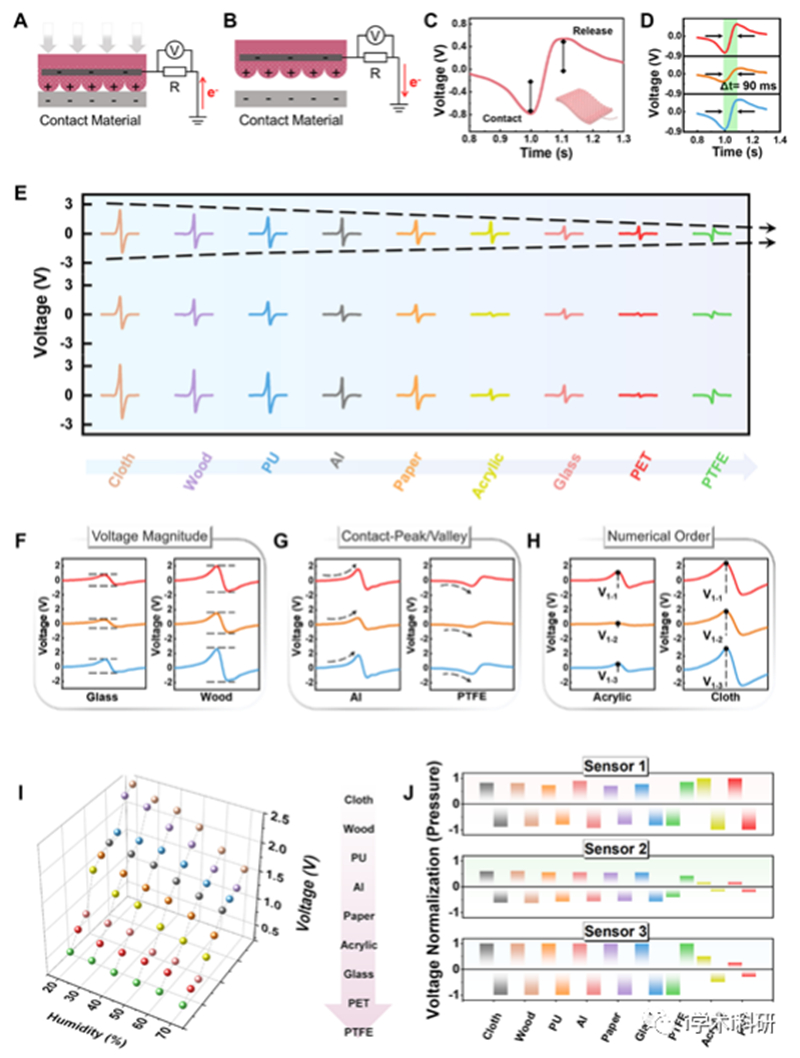
Fig. 2. The sensing mechanism and electric characteristics of the TTS.
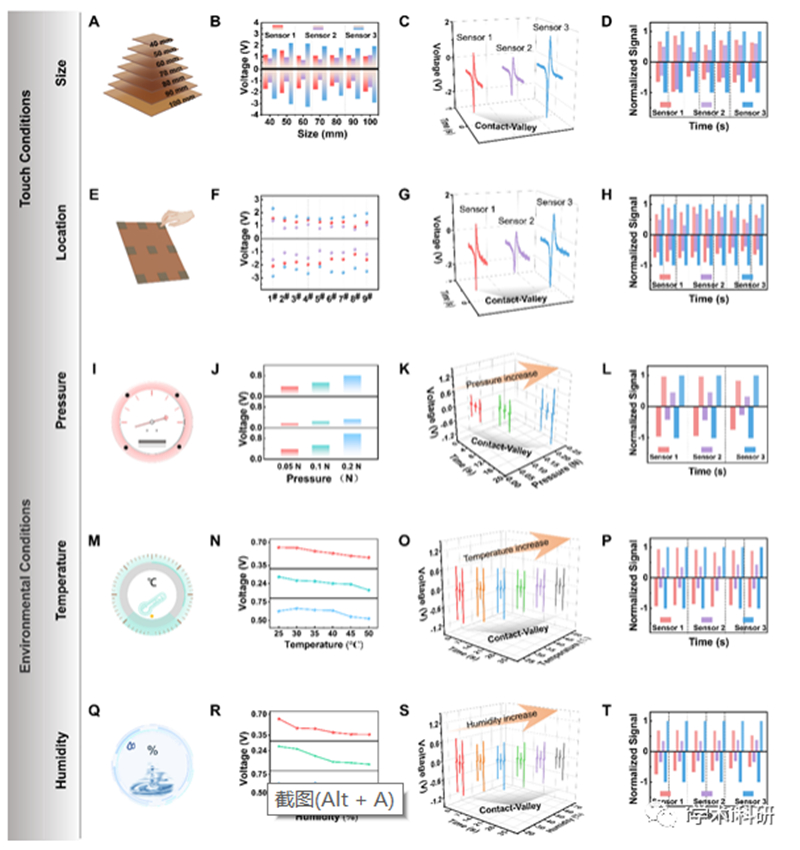
Fig. 3. Electric characterization and sensing capability of the TTS in response to changing touch and environmental conditions.

Fig. 4. The enhanced material identification system using a neural network model (VGG).
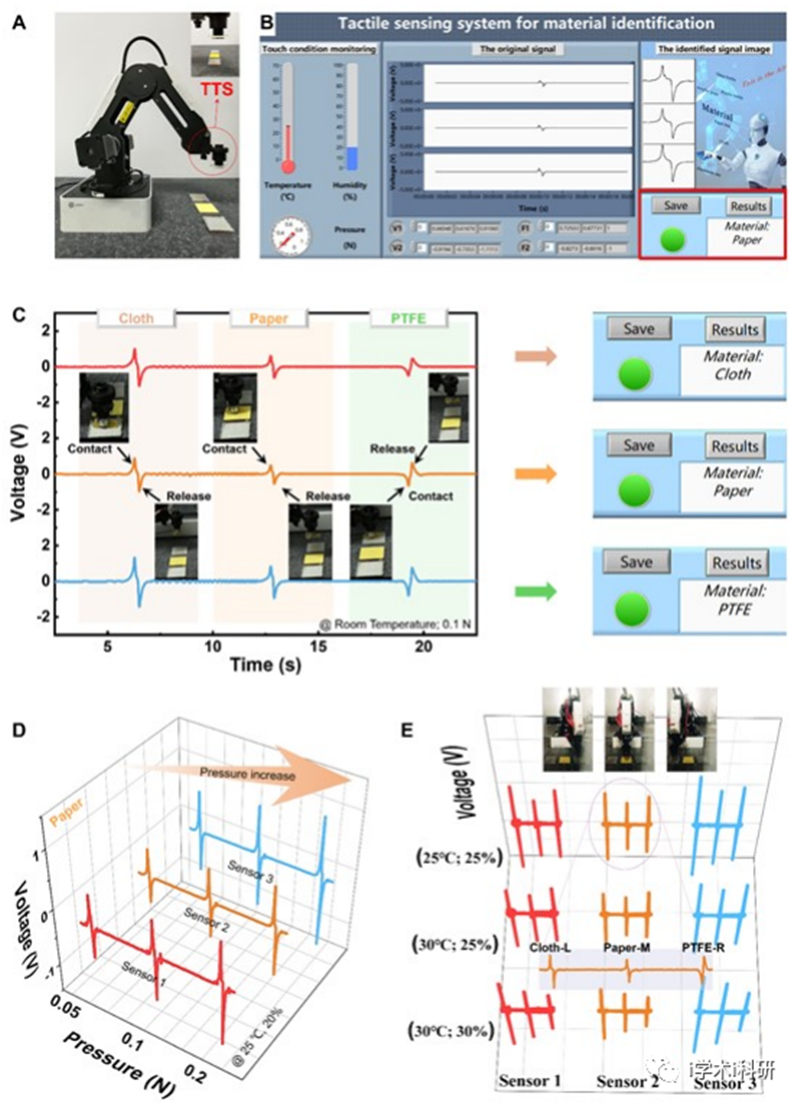
Fig. 5. Demonstration of the intelligent tactile sensing system for material identification at different contact conditions.
总结与展望
综上所述,作者开发了一个智能触觉感应系统,包括一个具有凸起表面结构的TTS阵列和一个基于深度学习的推理过程。TTS的全硅质地使其具有良好的柔韧性、拉伸性和机械稳定性。同时,所制备的TTS能够敏感地感知外部机械刺激,特别是在人类手指的压力范围内。此外,TTS 还具有制备简单、成本低、自供电和基于TENG的传感器的高集成度等一些优点。然而,由于摩擦静电传感器固有的环境限制,其可靠性仍然是一个主要问题。目前的工作采用了三个独立的STS阵列,从三个独立的三电信号、三个信号之间的相对关系以及对应于同一材料的归一化输出信号中提取可靠而独特的特征信息,而不是仅仅依靠一个STS。它实现了不受触摸条件和外部环境条件影响的准确识别。可以进一步考虑扩大传感器的数量,使其更加小型化,以提高预测的准确性和实用性。基于TTS的电压信号,集成了一种深度学习算法,在9种常见材料的识别任务中取得了96.62%的高准确率。此外, TTS的识别结果高于一个STS (传感器1: 56.40%; 传感器2: 63.32%)或两个STS (传感器1+传感器2: 72.11%),这再次证实了多传感器阵列感知材料的优势。在一次演示中,在机械臂的协助下,该触觉传感系统在开放环境中实现了精确和实时的材料识别。而且重要的是,触觉传感系统的识别过程很简单,超越了人类必须整合多种传感(触摸和观看)才能完成触觉感知,从而完成材料识别的复杂过程。所以,它对视障人士的认知学习、生物仿生假肢以及虚拟空间的构建都有很大的现实价值。在未来的工作中,更多的测试样本和更先进的深度学习算法值得我们去探索,以获得更多有意义的实际应用。
文献链接
Open-Environment Tactile Sensing System: Towards Simple and Efficient Material Identification, DOI: 10.1002/adma.202203073.
https://onlinelibrary.wiley.com/doi/10.1002/adma.202203073
厦门柔性电子研究院
福建省协同创新院柔性电子产业技术分院
地址:厦门市集美区集美大道1995号科技成果转化加速器1期4F
邮编:361024 电话:0592-5366222 邮箱:admin@flex-elec.com
部分图片来源于网络,如有侵权请联系删除