
研究背景
在过去的十年中,软体机器人这一新兴领域吸引了来自生物学、化学、材料科学和工程学的越来越多的多学科兴趣。软体机器人通常由柔软的弹性材料或柔性结构制成。它们独特的连续性、顺应性和适应性的特点提供了广泛的新功能,这些功能在传统的刚性机器人中是不可行的,例如,与人类和恶劣环境的安全和适应性互动,操纵精致的物体,在密闭空间的导航,以及多自由度的驱动力。
作为软体机器人的关键要素之一,软体执行器驱动软体的变形和运动以实现丰富的机器人功能。软执行器的设计利用了软执行材料的材料智能或与结构设计的机械智能相结。软驱动材料可以通过膨胀、收缩、弯曲、扭曲或组合,响应不同的驱动输入,包括气动/液压加压、温度、溶剂、水分、光、电和磁场,变形成不同的目标形状。这些材料可以进一步与丰富的结构设计相结合,以扩大和提高机器人的性能,包括双层结构,纤维增强结构,柔性机械超材料,张力结构,折纸/螺旋结构,和双稳态结构。
尽管在结构设计、材料驱动或机器人应用方面,软体机器人的软执行器有了很大的进展和最新的评论,但为软体机器人创造软执行器需要综合考虑结构设计、软材料、变形驱动和控制等因素,以实现理想的机器人功能。特别是,对于软体机器人中使用的不同的双稳态和多稳态结构,缺少重要的机械学指导的设计原则。它也缺乏一个路线图,说明如何在不同的驱动力下将双稳态和多稳态结构与软质材料结合起来,以实现目标机器人功能。本综述旨在弥补这一知识空白。它不仅提供了一个全面的回顾,涵盖了五类基本双稳态结构元素的力学指导下的结构设计原则,不同的软性致动材料,以及它们在不同机器人应用中的整合,而且对未来的机器人设计有深刻的指导或启发。
研究成果
在自然界(如维纳斯捕蝇草的快速折断)和我们的生活(如瓶盖和剪发器)中经常观察到啪嗒啪嗒的双态性。最近,在不同的结构和软材料中利用双稳态和多稳态引起了人们对高性能软执行器和软机器人越来越大的兴趣。它们在陆地和水下的高速运动、自适应传感和快速抓取、形状重构、单一输入的无电子控制和逻辑计算方面表现出广泛而独特的应用。在此,北卡罗来纳州立大学Jie Yin教授等人概述了将双稳态和多稳态结构与软驱动材料整合在一起,用于各种软执行器和软/柔性机器人。首先介绍了从一维到三维的五类基本双稳态元件(即约束梁、弧形板、圆顶壳、带有柔性铰链和可变形折纸的顺应机制以及气球结构)的力学指导下的结构设计原则,同时简要讨论了典型的软驱动材料( 即流体弹性材料和刺激响应材料,如电、光、热、磁和水响应聚合物)。随后,讨论了将这些软性材料与每一类双稳态元件集成在一起的软性双稳态和多稳态执行器及其不同的机器人应用。最后,对这一新兴领域的挑战和机遇进行了展望。相关报道以“Bistable and multistable actuators for soft robots: structures, materials, and functionalities”为题发表在Advanced Materials期刊上。
图文导读
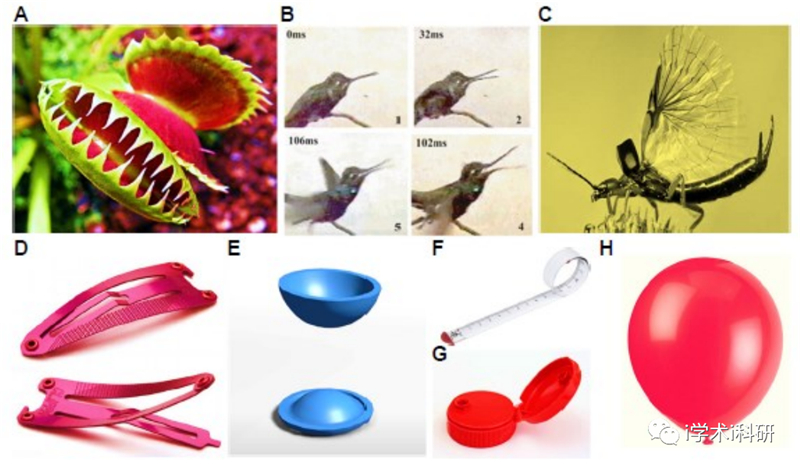
Figure 1. Representative natural and engineered bistable examples.

Figure 2. Overview of leveraging bistable and multistable soft actuators by integrating structures and soft actuating materials for achieving diverse soft robotic functionalities.
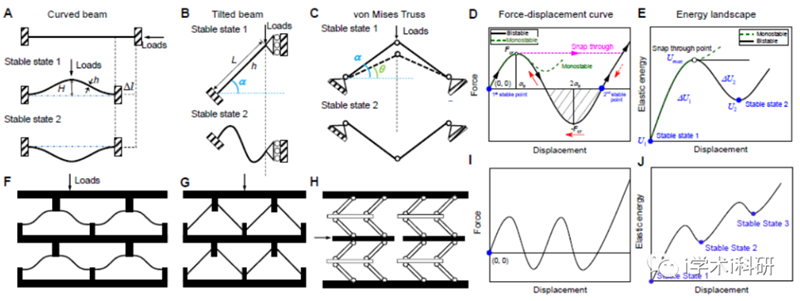
Figure 3. Representative constrained 1D bistable elements and their multistable structures.
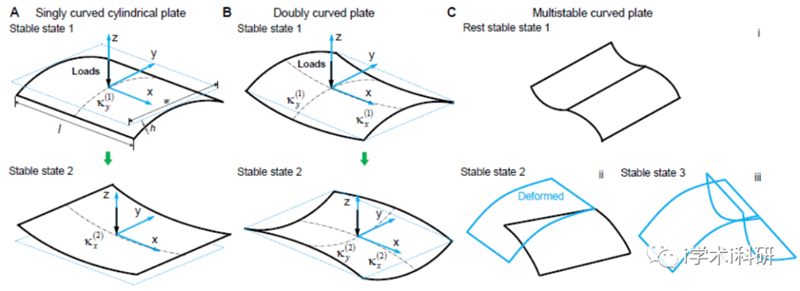
Figure 4. Bistable and multistable 2D curved plates.
总结与展望
将双稳态和多稳态结构与软性致动材料相结合,在软性机器人中实现了独特而广泛的应用,包括快速或顺序致动、快速或多模式运动、低能耗的安全操纵、机械学计算以及无电子控制。通过快速的能量释放,抢答使软执行器的快速反应和动态力放大。结合抢答和二元形状开关,可以诱导出有利于爬行、跑步和游泳的轴向运动,有利于跳跃的横向运动,以及有利于抓取的弯曲运动。将多个双稳态单元串联或并联或混合连接,就形成了一个多稳态软执行器或机器,其稳定状态和配置的数量大大增加。它为产生更复杂的运动提供了一个多功能的平台,如伸长/收缩、弯曲和扭曲,或通过调整每个单元中的二进制形状进行组合,以及利用组合二进制开关进行多比特信息存储和操作。
尽管有这样的承诺和进步,但也存在一些限制和挑战。首先,要精确控制连续的致动运动,特别是在需要精确位置控制的情况下(如精细抓取),在快穿的边缘和它的扣动过程中,仍然具有挑战性。这是在精确控制方面快穿的内在限制。这种限制可以通过精确控制卡穿前后的关键卡穿点来减少。其次,在一个多稳态致动器中使用单-或较少的驱动输入来实现丰富的形状变化是具有挑战性的。原则上,每个双稳态单元的独立控制和驱动可以在一个多稳态结构中产生所有的组合形状变化。然而,随着单元数量的增加,其复杂性也急剧增加。因此,在不牺牲已实现的可重构性的情况下,非常需要更少的致动输入。为了应对这一挑战,我们可以操纵连接的双稳态单元中的能量屏障来调整单一驱动下的形状变化,或者施加外部约束来局部或全局地耦合相互连接的单元中的形变。第三,为了实现强大的输出,它不仅需要双稳态机构的高能量存储能力,还需要软驱动材料产生足够的力输出以克服大的能量屏障。然而,软性致动材料的内在限制,即软性,使得它们很难跨越这样的能量峰值,从而大大削弱了集成双稳态机器的性能。为了解决这样的挑战,可以采用能够提供更高的工作密度和功率密度的软质智能材料,如TAMs和软质燃烧材料。
展望未来,双稳态和多稳态软执行器和软机器人的全部潜力仍有待于从基础和应用的角度进行探索。从根本上说,首先,双稳态和多稳态的动力学特性在很大程度上仍未得到探索。大多数建模工作集中在对快穿行为的静态或准静态分析上。然而,快穿本身是一个快速的动态过程。如何将快穿的双稳性和多稳性纳入动态运动的管理方程中,有可能产生新的知识,因此需要开发改进的新模型,以更好地预测不同软材料制成的代表性类别的双稳态结构的抢断时间尺度。此外,还需要考虑断裂时间尺度与能量屏障的关系。
从机器人功能的角度来看,大多数研究的双稳态或多稳态软体机器人都被设计成单任务的。随着机器人在操纵和不同运动模式方面的应用越来越广泛,利用双稳态和多稳态的策略来实现高性能的多任务软体机器人是很有前途的。它们可以实现多模式运动,以应对复杂的场景,包括爬行、跑步、攀爬、跳过障碍物和游泳,通过在单稳态、双稳态和多稳态模式之间切换或操纵能量屏障进行驱动,实现原位可调的运动速度。为了实现不同场景下的多模式运动,双重或多重驱动将有利于克服不同的能量障碍,例如,在软质活性材料(如液晶聚合物和水凝胶)中的双重热/光热和磁驱动。为了提高可操作性,非常需要通过集成板载控制和动力系统或利用远程刺激响应材料,以可控的方式对环境温度、光和/或磁场做出响应的无系留双稳态或多稳态软机器人。同时,大多数已证实的双稳态软体机器人在地面或水下的运动是单向的,这在很大程度上限制了其机动性。多方向的运动,如可控制的转弯,是非常需要的,其中可以变形为不同形状的多稳态将有助于打破双稳态设计中的对称变形和反作用力。它将通过适当地驱动多个稳定状态来促进转弯运动的进行。另外,对于跳跃机器人来说,非常需要在不需要持续的能量输入的情况下进行无拘束的跳跃。预存能量的顺序释放可以提供一种有希望的方式,通过操纵环境刺激,以可控的方式释放能量,实现无系留的重复跳跃的软体机器人。
同时,它有望将传感、无电子控制和计算集成到软体中,以实现自主和智能的软体机器人,这将在与非结构化环境互动时实现原地决策能力。特别是,对于多态软体机器人,鉴于其大量不同的可重构的身体形状,它将大大促进环境适应性自主可重构软体机器人的设计。通过综合传感和决策能力,它们有可能重新配置其身体形状,以适应与障碍物或密闭空间的互动或谈判,从而智能地避开障碍物并从复杂的密闭空间逃脱。此外,在工程结构和设备中广泛探索的双稳态在能量吸收和能量收集方面的其他好处仍有待在软体机器人中加以利用。双稳态和多稳态设计的能量吸收特性将有利于软体机器人在跳跃或奔跑时的安全着陆,以减少冲击力。同时,它也可以用来解决双稳态结构的硬抓取问题,以实现其在非侵入性抓取生物体的潜在应用,而不造成损害。
文献链接Bistable and multistable actuators for soft robots: structures, materials, and
nctionalities, https://doi.org/10.1002/adma.202110384
厦门柔性电子研究院
福建省协同创新院柔性电子产业技术分院
地址:厦门市集美区集美大道1995号科技成果转化加速器1期4F
邮编:361024 电话:0592-5366222 邮箱:admin@flex-elec.com
部分图片来源于网络,如有侵权请联系删除